从零开始搭建扩散模型
本文内容不完整,且原作者已停止更新。
本文内容为《扩散模型从原理到实战(人民邮电出版社)》代码实践,本机为 macOS arm64 环境。
前置知识
- 在 Notebook 中,
Cell是可以单独执行的一段 Python 代码块,类似于多个单独的代码文件,但每个Cell在运行时共享变量和内存,例如:x = 10y = x + 1虽然它们属于不同的“文件”,但它们共享同一个 Python 进程,因此print(y)print(y)不会报错。
环境创建与导入
-
在 PyCharm 中创建 conda 解释器,命名为
build_diffusion_model(建议小写+下划线) -
在
build_diffusion_model环境中执行
python -m pip install -U pip
pip install torch torchvision # 若使用CUDA,需使用selector选择CUDA版本
pip install diffusers matplotlib
python -c "import torch; print(torch.backends.mps.is_available())"
- 导出当前解释器环境以便复现
conda env export --no-builds > environment_macosx.yml
- 编写 Cell 实现模型的训练管线
mnist_baseline.ipynb
"""
依赖自检
"""
import sys
import importlib.util
print(f"{'='*10} 执行依赖自检 {'='*10}")
required_packages = [
("torch", "PyTorch" ),
("torchvision", "TorchVision"),
("diffusers", "Diffusers"),
("matplotlib", "Matplotlib")
]
missing_packages = []
for package_name, display_name in required_packages:
if importlib.util.find_spec(package_name) is None:
missing_packages.append(package_name)
else:
module = __import__(package_name)
version = getattr(module, '__version__', '未知版本')
print(f"{display_name}: {version}")
if missing_packages:
print(f"\n【ERROR】缺少以下依赖包: {', '.join(missing_packages)}")
sys.exit(1)
else:
try:
import torch
import torchvision
from torch import nn
from torch.nn import functional as f
from torch.utils.data import DataLoader
from diffusers import DDPMScheduler, UNet2DModel
from matplotlib import pyplot as plt
except Exception as e:
print(f"【ERROR】导入发生未知错误")
sys.exit(1)
print(f"{'='*10} 依赖自检完成 {'='*10}")
"""
Device 自检
Apple Silicon:优先 mps,否则 cpu
NVIDIA:优先 cuda,否则 cpu
"""
print(f"{'='*10} 执行硬件自检 {'='*10}")
try:
if torch.backends.mps.is_available():
device_name = "mps"
if torch.backends.mps.is_built():
print("【INFO】Use Apple Silicon (MPS)")
elif torch.cuda.is_available():
device_name = "cuda"
print("【INFO】Use NVIDIA")
else:
device_name = "cpu"
print("【INFO】Use CPU")
device = torch.device(device_name)
x = torch.ones(1).to(device) # 在CPU中创建张量,并将其移动至device,赋值给x
print(f"{device} 可以使用")
except Exception as e:
print(f"【ERROR】{e} 设备无法使用")
device = torch.device("cpu")
print(f"{'='*10} 硬件自检完成 {'='*10}")
"""
数据集测试
"""
# 数据集
dataset = torchvision.datasets.MNIST(
root="../data/datasets",
train=True, # 使用训练集,False为测试集
download=True, # 下载数据集
transform=torchvision.transforms.ToTensor() # 将图像转换为张量
)
# 为数据集创建数据加载器
dataset_loader = DataLoader(
dataset, # 要加载的数据对象
batch_size=16, # 每次迭代加载的样本数量
shuffle=True # 打乱数据顺序
)
# 从加载器中取出第一批数据
x, y = next(iter(dataset_loader))
print('Input shape:', x.shape)
print('Labels :', y)
plt.imshow(torchvision.utils.make_grid(x)[0], cmap = 'gray') # 以单通道取出所有图像,拼接成大图并用灰度显示
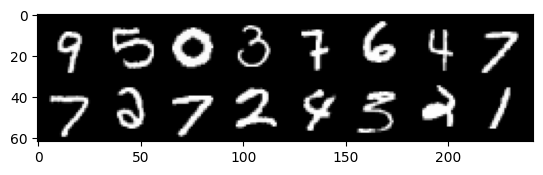
编写此管线的目的是测试硬件是否可调用。
模型的退化过程(前向过程)
在扩散模型中,“退化过程”指的是数据信息逐渐丧失的过程。狭义上理解就是不断向图像中添加高斯噪声的过程,直到图像完全变成各向同性的高斯噪声。
退化过程是扩散模型训练流程的一部分。扩散模型的整个训练流程可以简单归纳为:
准备数据 → 向数据中添加噪声 → 模型预测加进去了哪些噪声 → 计算与真实误差 → 调整权重
模型的产出过程(反向过程)则大致与上面的流程相反。从纯噪声开始,根据学到的经验预测并一步步移除噪声,就得到了产物。
当然,前向和反向过程都涉及复杂的数学原理,这里不展开叙述(我也看不懂)。
前面我们已经准备好了数据集,为了训练模型,我们需要往训练集中人为添加噪声。
为了查看不同噪声程度下的图片,我们可以引入一个变量来手动控制内容“损坏”的程度。
如下方的代码所示。其中 amount 是我们引入的、人为控制的变量,x 为图像张量,noise 为噪声,noise_x 为加了噪声后的张量。
noised_x = (1-amount) * x + amount * noise
可以看出,当 amount = 0 时,noise_x 与原始张量相同;当 amount = 1 时,noise_x 则为纯粹的噪声。
这种方法在数学上叫做线性插值。
当然,amount 的值不是手动填写的,那样训练就太低效了。在深度学习中,我们通常不是一张一张地处理图片,而是成批(Batch)处理,我们通常会为这一批次里的每一张图随机生成一个不同的损坏程度。
x (图像张量) 的形状通常是 [Batch_size, Channels, Height, Width]。
例如在上面的代码中,输出的 Input shape 为 [16, 1, 28, 28],表示一共有 16 张 1 通道的 28x28 图片。
问题在于:如果 amount 是 1 维的随机数,那么它直接乘以 4 维的张量会发生错误。
为了让 amount 能和 x 相乘,我们需要把 amount 从 1 维变成 4 维,形状变为 [ , , , ]。
于是,我们就需要用到 PyTorch 的 .view() 方法来改变张量的形状。
.view(-1, 1, 1, 1) 内有几个参数,其中 -1 表示自动计算一个批次的数量,其余的 1 都表示自动适配图片规格。其实整个方法都是起自动适配的作用。
"""
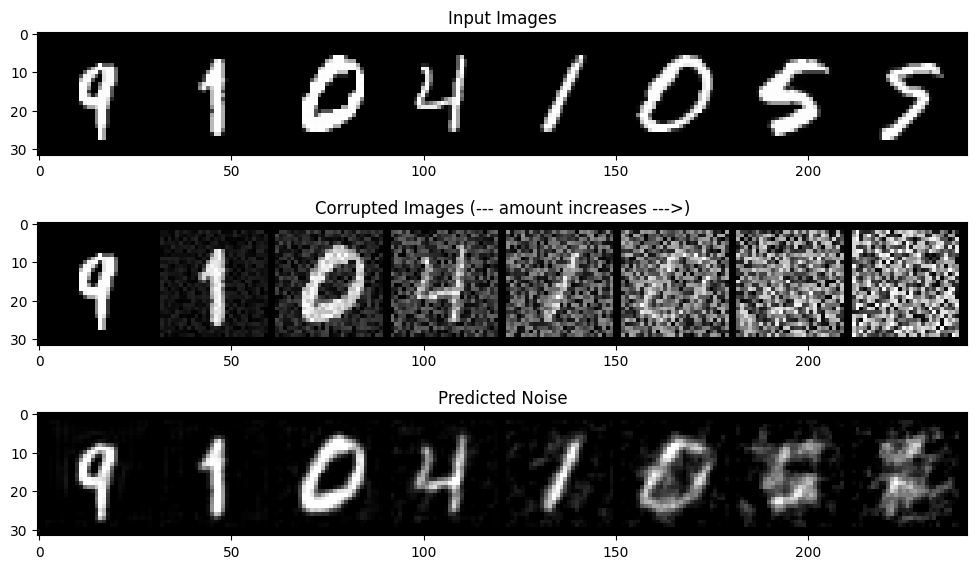
添加噪声,并对输出结果进行可视化
"""
def corrupt(x, amount):
"""
根据给定的amount值,向输入张量x中添加噪声,返回添加噪声后的张量
"""
amount = amount.view(-1, 1, 1, 1) # 调整amount形状以便广播
noise = torch.rand_like(x) # 生成与x形状相同的噪声
return x * (1 - amount) + noise * amount
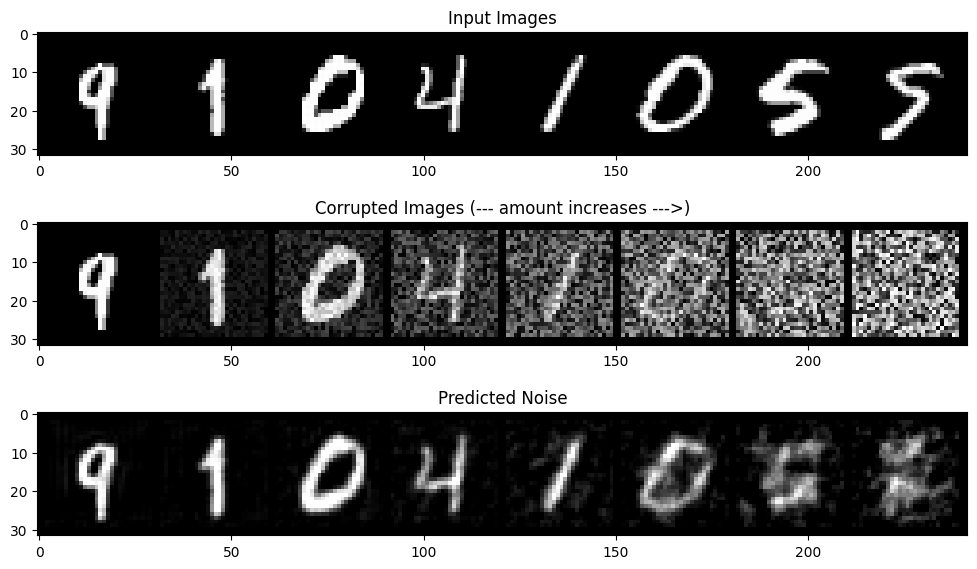
# 绘制输入数据
fig, axs = plt.subplots(2, 1, figsize=(12, 5)) # 画布行数,画布列数,画布大小。plt.subplots返回两个方法,第一个是画布对象fig,第二个是子图对象axs
plt.subplots_adjust(hspace=0.4) # 扩大子图间距
axs[0].set_title('Input Images')
axs[0].imshow(torchvision.utils.make_grid(x)[0], cmap='gray') # 以单通道取出所有图像,拼接成大图并用灰度显示
# 加入噪声
amount = torch.linspace(0, 1, x.shape[0]) # 在指定的范围内,生成一组等距离的数字,数量与x的Batch_size相同
noised_x = corrupt(x, amount)
# 绘制加入噪声后的图像
axs[1].set_title('Corrupted Images (--- amount increases --->)')
axs[1].imshow(torchvision.utils.make_grid(noised_x)[0], cmap='gray')
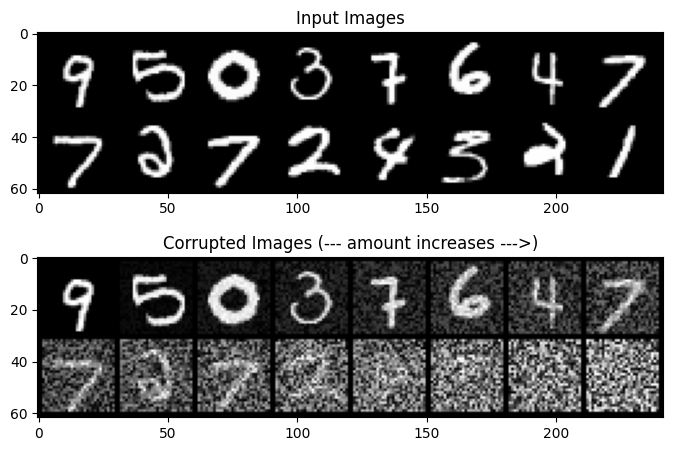
我们可以发现,当噪声量接近 1 时,数据看起来像是随机的噪声图。
模型的训练过程
我们可以参考 UNet 神经网络的架构来预测噪声,最终输出剔除噪声后的结果。
UNet 架构预测噪声的流程如下:
输入:加噪图片 ↓ [ 下采样(降低图片分辨率) ] → 了解图片整体结构,哪一块有噪声 ↓ 中间过程 ↓ [ 上采样 (提升图片分辨率)] → 精确定位噪声位置 ↓ 输出:预测的噪声位置
下采样分为以下几个步骤:
输入特征图 ↓ 卷积 + 激活 ↓ 卷积 + 激活 ↓ 下采样(池化 或 步长卷积) ↓ 输出给下一层
-
卷积:一个数学运算动作。指卷积核在输入图像上“滑动”,并进行“乘加运算”的过程。
- 卷积层:一个容器。封装了卷积核、偏置项(Bias)以及上述的卷积运算规则。
- 卷积核:本质上是一个很小的数字矩阵(权重矩阵)。
- 卷积层:一个容器。封装了卷积核、偏置项(Bias)以及上述的卷积运算规则。
-
激活:将卷积生成的线性函数变为分段函数。
现实世界的生成规则本身就是“条件触发 + 局部规则叠加”的,这种规则在数学上必然表现为“分段的、拼接的、非线性函数”。因此单一的线性函数无法拟合现实世界。
例如判断:
“一个像素是不是边缘?”
真实规则类似为:
-
如果左边亮、右边暗 → 是边缘
-
如果上边亮、下边暗 → 是边缘
-
如果整体都差不多亮 → 不是边缘
以 ReLU 函数为例:
ReLU(x) = max(0, x)第一层卷积后:
y=2x−2激活:
h=ReLU(y)=max(0,2x−2)第二层卷积后:
z=3h+1代入几个
x后可以发现变成了分段函数:x z 0 1 1 1 2 7 3 13 -
在
x ≤ 1的时候,输出完全不变(一直是 1) -
在
x > 1的时候,输出开始按直线快速增长
-
-
池化:下采样的一种方式。最常见的是最大池化,即保留一片区域中的最显眼特征。还有一种操作是平均池化。
 设池化窗口为 2x2,采用最大池化,用数字演示就是最大的值:
设池化窗口为 2x2,采用最大池化,用数字演示就是最大的值:1 2 3 4 0 -1 8 -6 6 -3 7 0 3 2 -1 -9 池化后,我们可以得到一个新的 2x2 表格: --- --- 2 8 6 7 引入池化层可以提高模型的平移不变性,即当输入存在少量平移时,输出的结果不会产生很大影响。 -
步长卷积:卷积核滚动过程中,会跳过特定步长区域的值。
class BasicUnet(nn.Module):
"""
一个简单的UNet网络部署
"""
def __init__(self, in_channels=1, out_channels=1):
super().__init__() # 初始化
# 下采样路径,包含三个卷积层
self.down_layers = torch.nn.ModuleList([
nn.Conv2d(in_channels, 32, kernel_size=5, padding=2), # 由输入通道数生成32个特征图,卷积核大小为5x5,填充为2以保持尺寸
nn.Conv2d(32, 64, kernel_size=5, padding=2), # 由32个特征图生成64个特征图
nn.Conv2d(64, 64, kernel_size=5, padding=2), # 不继续上升通道,防止过拟合
])
# 上采样路径,包含三个转置卷积层
self.up_layers = torch.nn.ModuleList([
nn.ConvTranspose2d(64, 64, kernel_size=5, padding=2),
nn.ConvTranspose2d(64, 32, kernel_size=5, padding=2),
nn.ConvTranspose2d(32, out_channels, kernel_size=5, padding=2),
])
self.act = nn.SiLU() # 激活函数
self.downscale = nn.MaxPool2d(2) # 下采样使用最大池化法,窗口大小为2x2
self.upscale = nn.Upsample(scale_factor=2) # 上采样使用插值法
def forward(self, x):
h = [] # 创建一个空列表,保存下采样前的数据供上采样参考,以免上采样时丢失信息
# 下采样循环 (Encoder)
for i, l in enumerate(self.down_layers):
x = self.act(l(x)) # 卷积 -> 激活
if i < 2: # 前两层卷积层执行以下操作
h.append(x) # 把当前特征图存入 h 列表
x = self.downscale(x) # 池化
# 上采样循环 (Decoder)
for i, l in enumerate(self.up_layers):
if i > 0: # 除了第一个上采样层外,其他层都执行以下操作
x = self.upscale(x) # 插值
x = x + h.pop() # 与对应的下采样特征图相加(跳跃连接)
x = self.act(l(x)) # 转置卷积 -> 激活
return x # 返回预测的噪声
需要额外说明的几个点:
-
卷积核大小通常为奇数。偶数大小的效果不好。
-
padding是额外填充的内容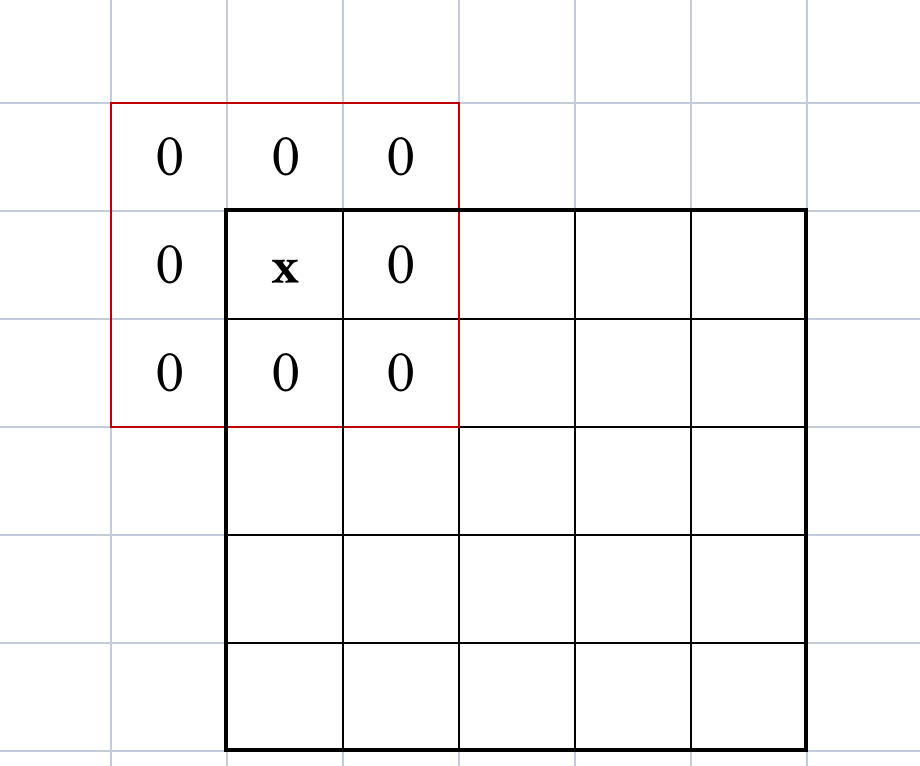
设红色为 3x3 卷积核,当卷积核中心对准左上角第一个值时,部分卷积核会跃出边界。然而边界外的值是不存在的,于是我们就需要填充一个“虚拟边界”防止跨界问题。边界的宽度就是
padding。图中的 padding 值为 1。若卷积核为 5x5,padding 值就为 2。
完成一个简单的 UNet 网络后,我们可以验证输出结果的形状与输入的形状是否相同。同时查看整个网络的参数大小。
"""
验证输入和输出的形状是否相同,并查看 UNet 网络的参数量
"""
net = BasicUnet()
x = torch.rand(8, 1, 28, 28) # 生成形状 (8,1,28,28) 的随机张量
net(x).shape # 将随机张量丢进网络,查看输出形状是否与输入相同
print(net(x).shape)
sum(p.numel() for p in net.parameters()) # 计算网络的参数量
torch.Size([8, 1, 28, 28]) 309057
现在给定一个带噪的输入 noisy_x,扩散模型应该输出对原始输入 x 的最佳预测。同时,我们需要通过均方误差比较预测值与真实值。总体流程如下:
-
获取一批数据
-
添加随机噪声
-
将数据输入模型
-
对模型预测与初始图像进行比较,计算损失更新模型的参数
"""
开始训练模型
"""
batch_size = 512
# 数据加载器
dataset_loader = DataLoader(
dataset, # 要加载的数据对象
batch_size = batch_size, # 每次迭代加载的样本数量
shuffle=True # 打乱数据顺序
)
# 运行周期
num_epochs = 3
# 创建 UNet 网络
net = BasicUnet().to(device)
# 损失函数(均方误差)
loss_fn = nn.MSELoss()
# 优化器,根据损失函数结果调整网络权重
optimizer = torch.optim.AdamW(net.parameters(), lr=1e-3) # 学习率:1e-3
# 记录训练损失
loss_history = []
# 训练循环
for epoch in range(num_epochs):
for x, y in dataset_loader:
# 加载数据并添加噪声
x = x.to(device) # 加载数据
noise_amount = torch.rand(x.shape[0]).to(device) # 为每个样本生成一个随机的噪声数量
noisy_x = corrupt(x, noise_amount) # 向样本中添加噪声
# 预测的噪声结果
predicted_noise = net(noisy_x)
# 计算损失
loss = loss_fn(predicted_noise, x) # 对比预测噪声与原始图像
# 反向传播并更新权重
optimizer.zero_grad() # 清除之前的梯度
loss.backward() # 反向传播计算新的梯度
optimizer.step() # 更新权重
# 记录损失
loss_history.append(loss.item())
# 输出每个 epoch 的损失均值
avg_loss = sum(loss_history[-len(dataset_loader):]) / len(dataset_loader)
print(f"Finished epoch {epoch}. Average loss: {avg_loss:05f}")
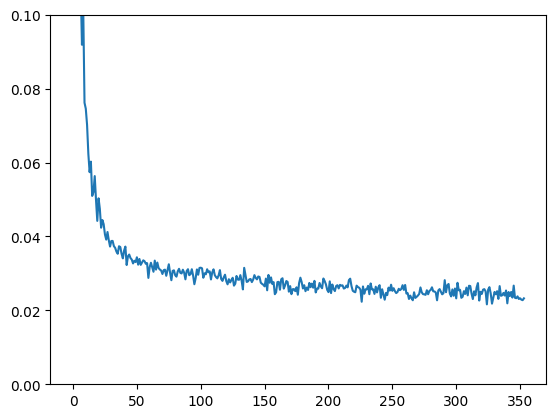
# 绘制损失曲线
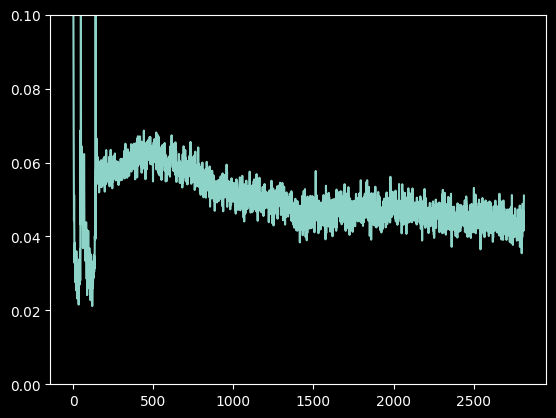
plt.plot(loss_history)
plt.ylim(0, 0.1)
Finished epoch 0. Average loss: 0.043167 Finished epoch 1. Average loss: 0.026925 Finished epoch 2. Average loss: 0.024780 (0.0, 0.1)
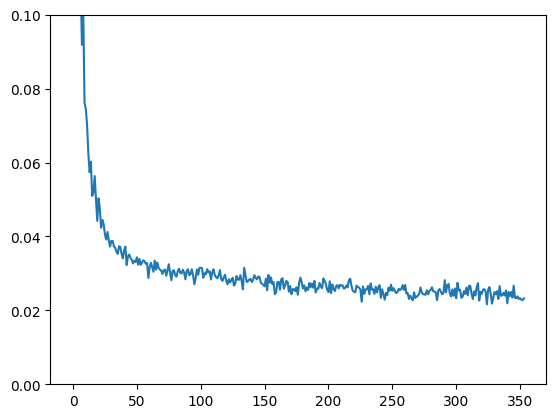
损失曲线
接下来可以看看模型预测的结果,对比原始、加噪后的图像是什么样的。
"""
观察训练结果
"""
x, y = next(iter(dataset_loader)) # 从数据集中取出一批数据
x = x[:8] # 取出前8个样本
amount = torch.linspace(0, 1, x.shape[0]) # 生成一组等距离的噪声数量
noised_x = corrupt(x, amount) # 向样本中添加噪
# 得到模型预测结果
with torch.no_grad(): # 在评估模式下,不计算梯度
predicted_noise = net(noised_x.to(device)).cpu() # 预测噪声,将结果移回CPU(NumPy无法绘制GPU数据)
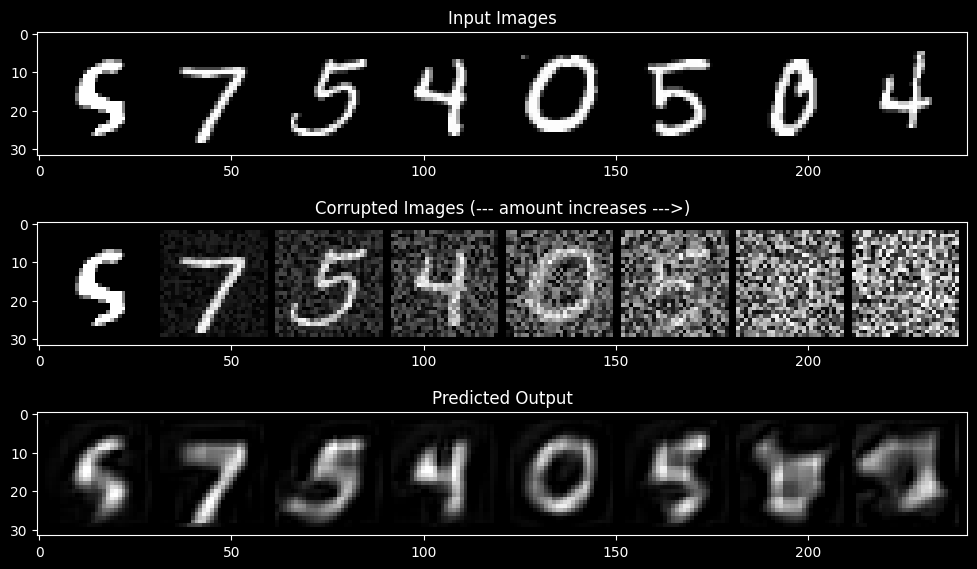
# 绘制结果
fig, axs = plt.subplots(3, 1, figsize=(12, 7))
axs[0].set_title('Input Images')
axs[0].imshow(torchvision.utils.make_grid(x)[0].clip(0, 1), cmap='gray')
axs[1].set_title('Corrupted Images (--- amount increases --->)')
axs[1].imshow(torchvision.utils.make_grid(noised_x)[0].clip(0, 1), cmap='gray')
axs[2].set_title('Predicted Noise')
axs[2].imshow(torchvision.utils.make_grid(predicted_noise)[0].clip(0, 1), cmap='gray')
模型的采样过程
如上图所示,尽管模型在噪声量较少时的预测结果不错,但在噪声数量较高时结果几乎不准确。
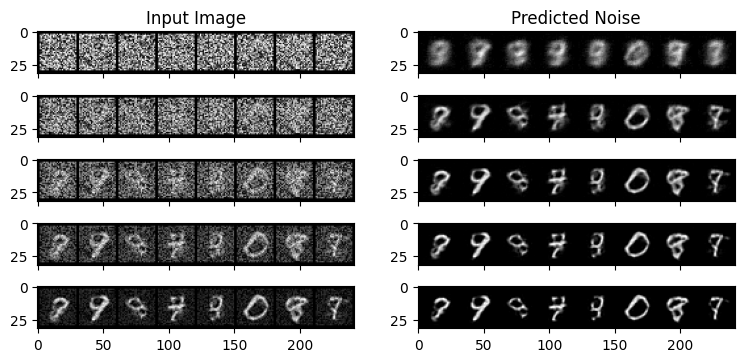
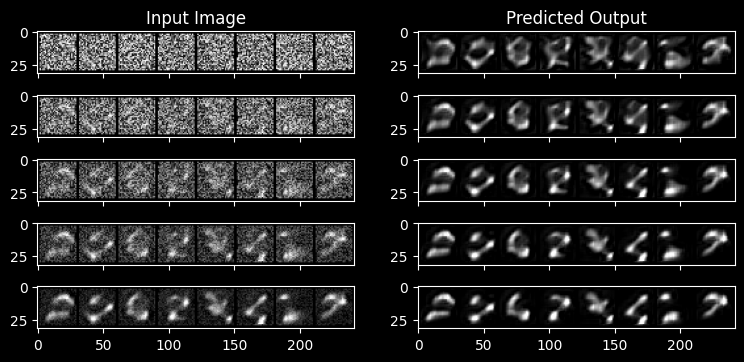
我们可以通过拆解采样步骤来提高预测质量:例如将预测 20% 后的输出作为下一次预测的输入。
"""
拆解采样步骤
"""
step = 5
x = torch.rand(8, 1, 28, 28).to(device) # 随机初始化一个图像张量
step_history = [x.detach().cpu()] # 每个步骤的图像
predicted_output = [] # 每个步骤的预测输出
for i in range(step):
with torch.no_grad():
predicted_image = net(x) # 预测噪声
predicted_output.append(predicted_image.detach().cpu()) # 记录预测输出
mix_factor = 1/(step - i) # 朝预测方向移动的步骤
x = x * (1 - mix_factor) + predicted_image * mix_factor # 更新图像
step_history.append(x.detach().cpu()) # 记录当前步骤的图像
# 绘制每个步骤的图像和预测输出
fig, axs = plt.subplots(step, 2, figsize=(9, 4), sharex=True)
axs[0, 0].set_title('Input Image')
axs[0, 1].set_title('Predicted Noise')
for i in range(step):
axs[i, 0].imshow(torchvision.utils.make_grid(step_history[i])[0].clip(0, 1), cmap='gray')
axs[i, 1].imshow(torchvision.utils.make_grid(predicted_output[i])[0].clip(0, 1), cmap='gray')
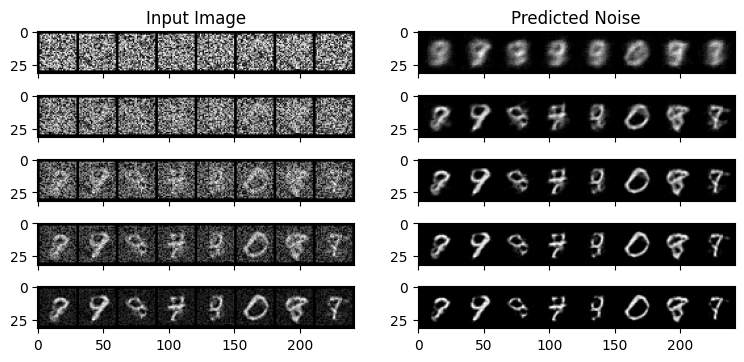
训练轮数过小时,生成质量不佳。此图在 num_epochs = 50,batch_size = 128 下得出。
DDPM 算法与 UNet2DModel
下面我们使用另一种神经网络架构:UNet2DModel 来训练模型。
UNet2DModel 使用了 DDPM 算法,同时引入了注意力机制,其架构和性能比 UNet 更加先进。
注意力机制
没错,就是那个 LLM 的注意力机制**《Attention is All You Need》**。
现在的 LLM(大语言模型)和高级扩散模型(如 Stable Diffusion),包括一些视频生成模型等背后的核心架构都是 Transformer 的变体。
在 2017 年 Google 发布的一篇名为 **《Attention is All You Need》**的论文中,Transformer 架构首次问世并提出了注意力机制。这个机制彻底颠覆了以往处理序列数据(如文字、时间序列)和图像数据的方法。
在 Transformer 出现之前,AI 的底层逻辑主要是靠 RNN(循环神经网络) 和 CNN(卷积神经网络)。RNN 常用于处理语音、文本序列,CNN 常用于处理图像序列。我们上面用到的经典 UNet 神经网络架构就是基于 CNN 的。
这两种架构都存在一定问题:RNN 记性差、无法做到并行计算;CNN 卷积核只能看到局部,很难理解图像中相距很远的两部分之间的逻辑关系,生成的图像会出现牛头不对马嘴的情况。引入注意力机制,就能让图片中的所有像素关联起来。
在 Stable Diffusion 这种可以通过文字生成图片的模型中,Attention 还有一个更高级的用法叫 Cross-Attention(交叉注意力机制)。图片不仅与自身关联,也与输入的 Prompt关联。
但由于计算量很大,Attention 通常只放在 UNet 图像尺寸最小的那几层(瓶颈层或采样中间层)以提高训练效率。
由于引入了两层注意力算子,UNet2DModel 的训练时间很长,我这里调整了一下代码,尝试使用 Metal API 加速(我也不知道有没有用)。
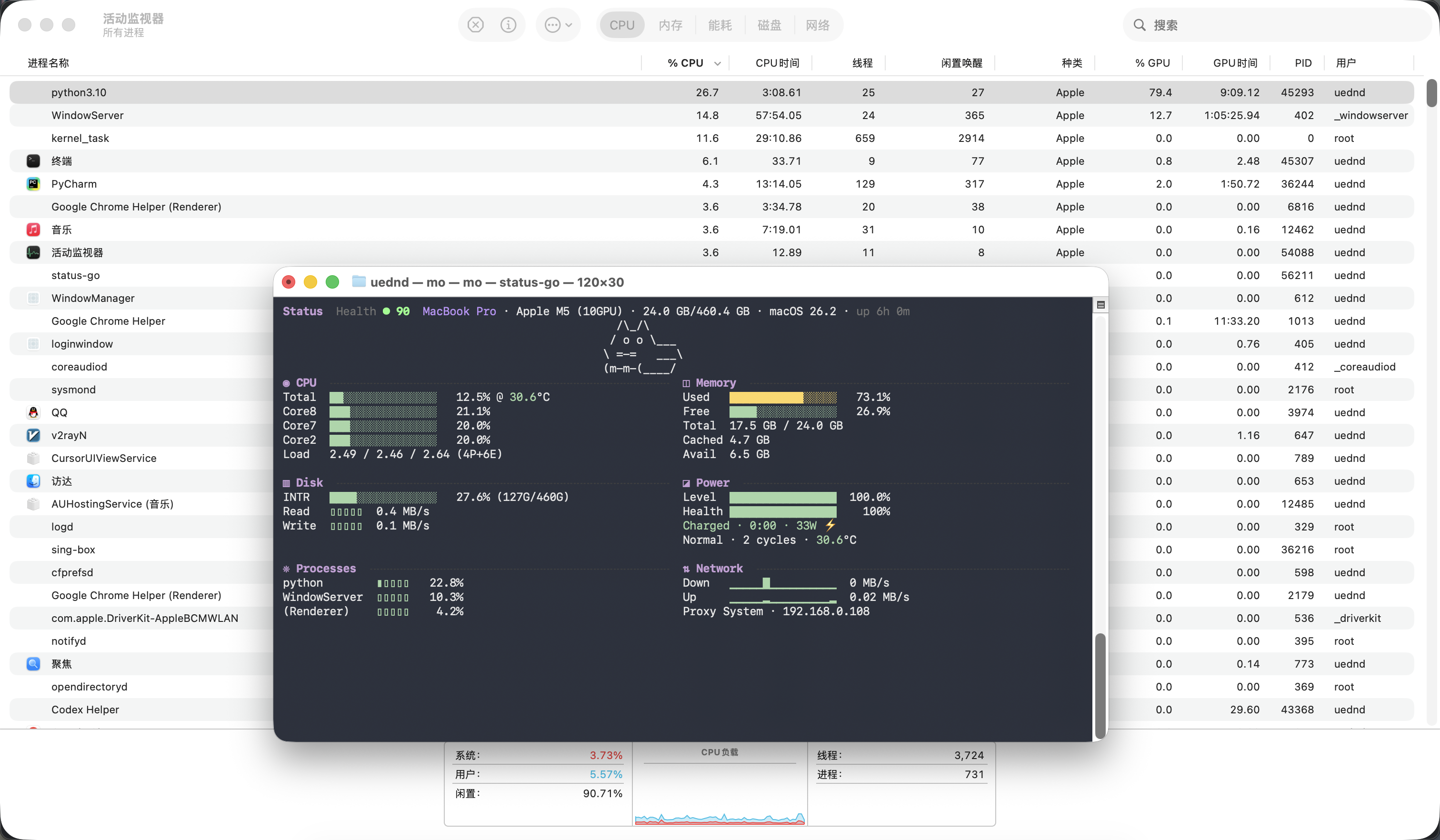
训练时的整机功耗来到了 33W,约 4 分钟完成一个 epoch(比谷歌的 TPU 还快?)
同样是 3 轮 epoch,训练完的损失率比经典 UNet 还高,这是怎么会事呢?
经典 UNet
UNet2DModel
经典 UNet
UNet2DModel
经典 UNet
UNet2DModel
生成蝴蝶图像
需要先注册 Hugging Face 并获取 Access Token,便于上传模型。
"""
依赖自检
"""
import sys
import os
from pathlib import Path
project_root = Path.cwd().parent
sys.path.insert(0, str(project_root / 'src'))
env_path = project_root / '.env'
if env_path.exists():
for line in env_path.read_text().splitlines():
line = line.strip()
if not line or line.startswith('#') or '=' not in line:
continue
key, value = line.split('=', 1)
value = value.strip().strip("'").strip('\"')
os.environ.setdefault(key.strip(), value)
from diffusion.env import ensure_dependencies
ensure_dependencies()
import torch
from torch.nn import functional as f
from torchvision import transforms
from datasets import load_dataset
"""
Device 自检
"""
from diffusion.env import select_device
device = select_device(torch)
"""
加载数据集
"""
from diffusion.data import create_dataloader
from diffusion.hf import login_hf
login_hf()
dataset = load_dataset('huggan/smithsonian_butterflies_subset', split='train')
image_size = 32
batch_size = 64
# 图像预处理
preprocess = transforms.Compose(
[
transforms.Resize((image_size, image_size)), # 统一图像大小(宽x高)
transforms.RandomHorizontalFlip(), # 随机水平翻转图像
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]), # 归一化到 [-1, 1]
]
)
def transform(examples):
"""对数据集中的图像进行预处理"""
images = [preprocess(image.convert("RGB")) for image in examples['image']]
return {'images': images}
# 动态函数,获取数据集内容时,对数据集进行转换
dataset.set_transform(transform)
train_dataloader = create_dataloader(
dataset,
batch_size=batch_size
)
"""
可视化图像数据
"""
from PIL import Image
from diffusion.visualize import show_images
xbatch = next(iter(train_dataloader))['images'].to(device)[:8]
print(f'批量图像张量形状: {xbatch.shape}') # torch.Size([8, 3, 32, 32])
show_images(xbatch).resize((8 * 64, 64), resample=Image.NEAREST)

在模型的训练阶段中,我们需要获取这些输入图像并为它们添加噪声,然后将“带噪”的图像输入模型;在推理阶段,我们将使用模型的预测结果逐步消除这些噪声。
在扩散模型中,这两个步骤是由调度器(scheduler)处理的。
下面为图像添加噪声:
"""
为图像添加噪声
"""
from diffusers import DDPMScheduler
noise_scheduler = DDPMScheduler(
num_train_timesteps=1000
)
timesteps = torch.linspace(0, 999, 8).long().to(device) # 8 个时间步
noise = torch.randn_like(xbatch) # 生成随机噪声
noisy_xbatch = noise_scheduler.add_noise(xbatch, noise, timesteps) # 添加噪声
print(f'添加噪声后的图像张量形状: {noisy_xbatch.shape}') # torch.Size([8, 3, 32, 32])
show_images(noisy_xbatch).resize((8 * 64, 64), resample=Image.NEAREST)

下一步应该是定义模型了。前面我们已经学习过 UNet 模型的基本结构。
"""
创建扩散模型
"""
from diffusers import UNet2DModel
model = UNet2DModel(
sample_size=image_size, # 输入图像的大小(宽和高)
in_channels=3, # 输入图像的通道数(RGB 图像为 3)
out_channels=3, # 输出图像的通道数
layers_per_block=2, # 每个块中的层 ResNet 层数
block_out_channels=(64, 128, 128, 256), # 每个块的输出通道数
down_block_types=( # 下采样块类型
"DownBlock2D",
"DownBlock2D",
"AttnDownBlock2D",
"AttnDownBlock2D"
),
up_block_types=( # 上采样块类型
"AttnUpBlock2D",
"AttnUpBlock2D",
"UpBlock2D",
"UpBlock2D"
)
).to(device)
"""
创建训练循环
"""
import numpy as np
from matplotlib import pyplot as plt
noise_scheduler = DDPMScheduler(
num_train_timesteps=1000,
beta_schedule="squaredcos_cap_v2"
)
optimizer = torch.optim.AdamW(model.parameters(), lr=1e-4)
losses = []
num_epochs = 50
for epoch in range(num_epochs):
for step, batch in enumerate(train_dataloader):
clean_images = batch['images'].to(device)
# 1. 生成噪声
noise = torch.randn(clean_images.shape).to(clean_images.device)
bsz = clean_images.shape[0]
# 2. 为每张图像随机选择时间步
timesteps = torch.randint(
0, # 最小时间步
noise_scheduler.num_train_timesteps, # 最大时间步
(bsz,), # 生成 bsz 个时间步
device=clean_images.device
).long()
# 3. 根据每个时间步的噪声大小,添加噪声
noisy_images = noise_scheduler.add_noise(
clean_images,
noise,
timesteps
)
# 4. 预测噪声
noise_pred = model(
noisy_images,
timesteps,
return_dict=False
)[0]
# 5. 计算损失
loss = f.mse_loss(noise_pred, noise)
loss.backward(loss)
losses.append(loss.item())
# 6. 优化模型参数
optimizer.step()
optimizer.zero_grad()
# 每 5 个周期打印一次损失
if (epoch + 1) % 5 == 0:
loss_last_epoch = sum(losses[-len(train_dataloader):]) / len(train_dataloader)
print(f'Epoch {epoch+1}, Loss: {loss_last_epoch:.4f}')
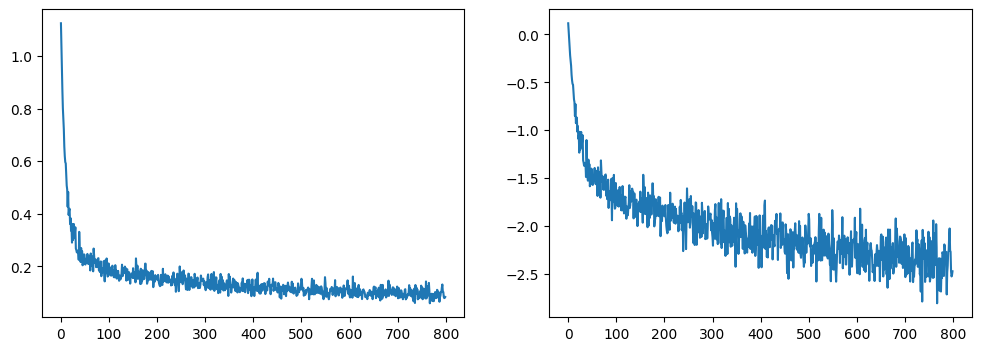
# 绘制损失曲线
fig, axs = plt.subplots(1, 2, figsize=(12, 4))
axs[0].plot(losses)
axs[1].plot(np.log(losses))
plt.show()
"""
使用模型生成图像
"""
from diffusers import DDPMPipeline
# 创建图像生成管线
image_pipeline = DDPMPipeline(
unet=model,
scheduler=noise_scheduler
)
# 生成图像
pipeline_output = image_pipeline()
pipeline_output.images[0]
生成的图像如下:

"""
保存模型和管线
"""
image_pipeline.save_pretrained("../models/generate_butterflies")
可以看到我们训练的模型大小将近 74MB
微调和引导
从上面的体验中可以得知,从头开始训练一个扩散模型需要很长的时间,且数据量也可能非常庞大。
对于这种情况,我们可以从一个已经训练过的模型开始训练——当你的新数据和原始模型的训练数据相似时。这种方法叫“微调”。例如若要生成卡通人脸,可以使用在人脸数据集上训练过的模型进行微调。
未施加生成条件的模型一般无法对生成的内容进行控制(例如控制图像的整体色调)。因此我们可以训练一个条件模型,使其接收额外输入,以此控制生成过程。对于没有生成条件的模型,可以使用引导函数。
将条件信息输入模型的方法有很多种:
-
将条件信息作为额外的通道输入 把条件信息直接和图像“捆”在一起。如果原图是 RGB 3 通道,条件图是 1通道,就把它们拼成一个 4 通道的输入送进模型第一层。这种方法受条件信息的影响很大,主要用于图生图、图像修复、超分辨率等任务。
-
特征融合 将条件转化成一个长向量,经变换后直接加到 UNet 中间每一层的特征图上。由于其为全局性指令,这种方法只能影响全局的风格、亮度和色调。
-
交叉注意力机制 上面已经解释过了。这种方法主要用于文生图。